Pre-script (dated 26 June 2020): This post got mutilated by the removal of some illustrations by the dark force. You should be able to follow the main story-line, however. If anything, the lack of illustrations might actually help you to think things through for yourself.
Original post:
This is just a quick post to answer a question of my 16-year old son, Vincent: why are we safe in a car when lightning strikes? What’s the Faraday effect really?
He wants to become an engineer, and so I told him what I knew: the electric charges reside at the surface of a conductor and, therefore, a fully-enclosed, all-metallic vehicle is safe. One should just not touch the interior metallic areas, surely not during the strike, but also not after the strike. Why? Because there may still be some residual charge left on the vehicle, even if the metal frame should direct all lightning currents to the ground.
Through the rubber of the tyres? Yes. In fact, it’s the rubber and other insulators that explain why some residual charge might be left. Indeed, the common assumption that, somehow, it’s the rubber that protects the occupants of a car (or that, somehow, rubber soles would insulate us in an electric storm and, hence, less likely to get hit) is ridiculous—completely false, really! The following quote from the US National Weather Service is clear enough on that:
“While rubber is an electric insulator, it’s only effective to a certain point. The average lightning bolt carries about 30,000 amps of charge, has 100 million volts of electric potential, and is about 50,000°F. These amounts are several orders of magnitude higher than what humans use on a daily basis and can burn through any insulator—even the ceramic insulators on power lines! Besides, the lightning bolt may just have traveled many miles through the atmosphere, which is a good insulator. Half an inch (or less) of rubber will make no difference.”
So that’s what I told him—sort of. However, I felt my answer (which I tried to get across as I was driving the car, in fact) was superficial and incomplete. So…
Vincent, here’s the full answer! I promise, no integrals or complex numbers. At the same time, it will be not so easy as the physics you learned in school, because I want to teach you something new. 🙂 Just try it. What I want to explain to you is Gauss’ Law. If you manage to go through it, you’ll know all you need to know about electrostatics, and it will make your first undergrad year a lot easier. [Especially that vector equation, as I always felt my math teacher never told me what a vector really was: it’s something physical. :-)]
Forces and fields
You’ve surely seen Coulomb’s Law:
F = ke·(q1q2)·(1/r212)
The ke factor is Coulomb’s constant: it is just a constant of proportionality, so it’s there to make the units come out alright. Indeed, Coulomb’s formula is simple enough: it says that the force is directly proportional to the amount of charge and inversely proportional to the square of the distance. That’s all. However, the units in which we measure stuff are not necessarily compatible: we measure distance in meter, electric charge in coulomb, and force in newton. So, if we’d define the newton as the force between two charges of one coulomb separated by a distance of one meter, then we wouldn’t need to put that ke factor there. But the newton has another definition: one newton is the force needed to accelerate 1 kg at a rate of 1 m/s per second.
Coulomb’s constant is usually written as ke = 1/4πε0 factor in more serious textbooks. Why? Well… You can read my note at the end of this post, but it doesn’t matter right now. It’s much more important to try to understand the vector form of Coulomb’s Law, which is written as:

I used boldface to denote F1 and F2 because they are force vectors. Vectors are physical ‘quantities’ with a magnitude (denoted by F1 and F2, so no boldface here) and a direction. That direction is given by the unit vector e12 in the equation: it’s a unit vector (so its length is one) from q2 to q1. Read again: from q2 to q1, not from q2 to q1. It’s important to get this one thing right, otherwise you’ll make a mess of the signs. Indeed, in the example below, q1 and q2 have the same sign (+) but their sign may differ (so we have a plus and a minus), and the formula above should still work. Check it yourself by doing the drawing for opposite charges.
 In fact, my drawing above has a small mistake: F2 is the same as F1 but I forgot to put the minus sign: the force on q2 is F2 = –F1. It’s the action = reaction principle, really.
In fact, my drawing above has a small mistake: F2 is the same as F1 but I forgot to put the minus sign: the force on q2 is F2 = –F1. It’s the action = reaction principle, really.
OK. That’s clear. Now you need to learn about the concept of a field: the field is the force per unit charge. So the field at q1, or the field at point (1), is the force on q1 divided by q1. For example, if q1 is three Coulomb, we divide by three. More in general, we write:
So now you know what the field vector E stands for: it is the force on a unit charge we would place in the field. To be clear, a unit charge is +1 unit. We can measure it in coulomb, or the proton charge, or the charge of a quark, or in whatever unit we want, but we’ve been using coulomb so far so let’s stick to that. Just in case you wonder: one coulomb is the charge of approximately 6.241×1018 protons, so… Yes. That’s quite a lot. 🙂
OK. Next thing.
Gauss’ Law
The field is real. We don’t have to put any charge there. The field is there, and it has energy. [There’s a formula for the energy, but I won’t bother you with that here, because we don’t need it.] The magnitude of the electric field, i.e. the field strength E = |E|, is measured in newton (N) per coulomb (C), so in N/C. In physics, we’ll multiply the field strength with a surface area so we get the so-called flux of the field, which is measured in (N/C)·m2. The illustration below (which I took from Feynman’s Lectures) is just as good as any. In fact, we have several surfaces here: we have a closed surface S with several faces, including surface a and b, which are spherical surfaces. The other surfaces of this box are so-called radial faces. The E field coming out of the charge is like a flow, and so the flow going through face a is the same as the flow going through face b: the b face is larger, but the field strength is less.
It is easy to show that the net flux is zero: Coulomb’s Law tells us that the magnitude of E decreases as 1/r2 while, from our geometry classes, we know that the surface area increases as r2, so their product is the same. So, if the surface area of a is Δa, and the surface area of b is Δb, then Ea·Δa = Eb·Δb and so the net flux through the box is equal to Eb·Δb − Ea·Δa = 0. So the flux of E into face a is just cancelled by the flux out of face b. Needless to say, there is no flux through the radial surfaces. Why? Because the electric force is a radial force.
OK. Let’s look at a more complicated situation:
When calculating the flux through a surface, we need to take the component of E that is normal to the surface, so that’s En = E·n = |E|·|n|·cosθ = |E|·cosθ. I am sure you’ve seen that much in your math classes: n is the so-called normal vector, so its length is one and it’s perpendicular to the surface. In any case, the point is: the net flux through this closed surface will still be zero.
Now it’s time for the Big Move. Look at the volume enclosed by the surface S below: we can think of it as completely made up of infinitesimal truncated cones and, for each of these cones, the flux of E from one end of each conical segment will be equal and opposite to the flux from the other end. So the total net flux from the surface S is still zero!
So we have a very general result here:
The (net) flux out of a volume that has no charge(s) in it is zero, always!
You’ll say: so what? Well… It’s a most remarkable result, really. First, it’s not what you’d expect intuitively, and, second, we can now use a clever trick to calculate the flux out of a volume that has some charge(s) in it. Let’s be clever about it. Look at the surface S below: it’s got a point charge q in it. Now we imagine another surface S’ around it: we imagine a little sphere centered on the charge.
From Coulomb’s Law, we know that, if the radius of our little sphere is equal to r, then the field strength E, everywhere on its surface, is equal to:
![]()
From your geometry class, you also know that the surface of a sphere is equal to 4πr2, so the flux from the surface of our little sphere is just the product of the field and the surface, so we write:
![]()
Now, the nice thing is that we can generalize this result for many charges, or for charge distributions, because we can simply add the fields for each of them: E = E1 + E2 + E3 + … That gives us Gauss’ Law:
The flux from any closed surface S = Qinside/ε0
Qinside is, obviously, the sum of the charges inside the volume enclosed by the surface.
OK. That’s Gauss’ Law. Let’s go back to our car. 🙂
The field in (and from) a conductor
An electrical conductor is a solid that contains many free electrons. Free electrons can move freely around, but cannot leave the surface. When we charge a conductor, the electrons will move around until they have arranged themselves to produce a zero electric field everywhere inside the conductor. It’s the corollary of Gauss’ Law: the (net) flux out of a volume that has no charge(s) in it is zero, always! And so the electrons will arrange themselves in order to make sure that happens.
Think about the dynamics of the situation: as long as there’s some field inside, the charges will keep moving. Fortunately (especially if you’re in a car or a plane hit by lightning!), the re-arrangement happens in a fraction of a second. Hence, if we have some kind of shell, then the field everywhere inside of the shell will be zero, always. In addition, when we charge a conductor, the electrons will push each other away and try to spread as much as possible, so they will reside at the surface of the conductor. In fact, the excess charge of any conductor is, on the average, within one or two atomic layers of the surface only. The situation is illustrated below:
Let me sum up the main conclusions:
- The electric field inside the conductor (E1) is zero. In other words, if a cavity is completely enclosed by a conductor, no distribution of charges outside can ever produce any field inside. But no field is no force, so that’s how the shielding really works!
- The electric field just outside the surface of a conductor (E2) is normal to the surface. There can be no tangential component. If there were a tangential component, the electrons would move along the surface until it was gone.
To be fully complete, the formula for the field just outside the surface of the conductor is E = σ/ε0, where σ is the local surface charge density. That local surface charge density can be quite high, of course, especially when lightning is involved—but it works! You’re safe in a car!
There’s one more point. You may think that you’ve seen that E = σ/ε0 formula before: it’s the formula for the field from a charged sheet, which is easy to calculate from Gauss’ Law. Indeed, if we look at some imaginary rectangular box that cuts through the sheet, as shown below (it’s referred to as a Gaussian surface), then the total flux is, once again, the field E times the area. Now, if the charge density (so the charge per unit area) is ρ, then the total charge enclosed in the box is σA. So the flux, on each side of the sheet, must be equal to E·A = σA/ε0, from which we get: E = σ/ε0. But so we have a field left and right. For our conductor, we only have the E = σ/ε0 field outside. So how does it work really?
We only have a field outside the conductor – and, hence, no field inside – because the charges in the immediate neighborhood of a point P on the surface will arrange themselves in such a way so as to produce a field that neutralizes the E = σ/ε0 field we’d expect on the inside. So we have ‘other charges’ here that come into play. The mechanics behind are similar to the mechanics behind the polarization phenomenon. If we have a negative charge density on the surface, we’ll have a positive charge density in the layer below. However, it’s quite complicated and, to analyze it properly, we’d need to analyze the electric properties of matter in more detail, which we won’t do here.
So… When everything is said and done, the phenomenon of ‘shielding’ is extremely complex indeed: it’s all about charges arranging themselves in patterns, and the result is truly remarkable: the fields on the two sides of a closed conducting shell are completely independent—zero on the inside, and E = σ/ε0 on the outside, with σ the local surface charge density. And it also works the other way around: if we’d have some distribution of charges inside of a closed conductor, those charges would not produce any field outside. So shielding works both ways!
Some closing remarks
A car is not a sphere. Some surfaces may have points or sharp ends, like the object sketched below. Again, the charges will try to spread out as much as possible on the surface, and the tip of a sharp point is as far away as it is possible from most of the surface. Therefore, we should expect the surface density to be very high there. Now, a high charge density means a high field just outside. In fact, if the electric field is too great, air will break down, so we get a discharge. As Feynman explains it:
“Air will break down if the electric field is too great. What happens is that a loose charge (electron, or ion) somewhere in the air is accelerated by the field, and if the field is very great, the charge can pick up enough speed before it hits another atom to be able to knock an electron off that atom. As a result, more and more ions are produced. Their motion constitutes a discharge, or spark. If you want to charge an object to a high potential and not have it discharge itself by sparks in the air, you must be sure that the surface is smooth, so that there is no place where the field is abnormally large.”
It explains why lightning is attracted to pointy objects, so you should stay away from them.
What about planes and lightning? Well… There’s a nice article on that on the Scientific American website. Let me quote a paragraph that sort of sums up what actually happens:
“Although passengers and crew may see a flash and hear a loud noise if lightning strikes their plane, nothing serious should happen because of the careful lightning protection engineered into the aircraft and its sensitive components. Initially, the lightning will attach to an extremity such as the nose or wing tip. The airplane then flies through the lightning flash, which reattaches itself to the fuselage at other locations while the airplane is in the electric “circuit” between the cloud regions of opposite polarity. The current will travel through the conductive exterior skin and structures of the aircraft and exit off some other extremity, such as the tail. Pilots occasionally report temporary flickering of lights or short-lived interference with instruments.”
One more thing perhaps: isn’t incredible that, even when lightning goes through a car or a plane, it’s only the surface that’s being affected? I mean… It’s fairly easy to see the equilibrium situation, which has the charges on the surface only. But what about the dynamics indeed? 30,000 amps, 100 million volts, and 25,000 to 30,000 degrees Celsius… As lightning strikes, that must go everywhere, no? Well… Yes and no. If there are pointy objects, lightning will effectively burn through them. For an example of the damage of lightning on the nose of an airplane, click this link. 🙂 But then… Well… Let me copy Feynman as he introduces the electric force:
“Consider a force like gravitation which varies predominantly inversely as the square of the distance, but which is about a billion-billion-billion-billion times stronger. And with another difference. There are two kinds of “matter,” which we can call positive and negative. Like kinds repel and unlike kinds attract—unlike gravity where there is only attraction. What would happen? A bunch of positives would repel with an enormous force and spread out in all directions. A bunch of negatives would do the same.”
So that’s what happens. The charges spread out, in a fraction of a second, all away from each other, and so they stay on the surface only, because that’s as far away as they can get from each other. As mentioned above, we’re talking atomic or molecular layers really, so they don’t penetrate, despite the incredible charges and voltages involved. Let me continue the quote—just to illustrate the strength of the forces involved:
“But an evenly mixed bunch of positives and negatives would do something completely different. The opposite pieces would be pulled together by the enormous attractions. The net result would be that the terrific forces would balance themselves out almost perfectly, by forming tight, fine mixtures of the positive and the negative, and between two separate bunches of such mixtures there would be practically no attraction or repulsion at all. […] There is such a force: the electrical force. And all matter is a mixture of positive protons and negative electrons which are attracting and repelling with this great force. So perfect is the balance, however, that when you stand near someone else you don’t feel any force at all. If there were even a little bit of unbalance you would know it. If you were standing at arm’s length from someone and each of you had one percent more electrons than protons, the repelling force would be incredible. How great? Enough to lift the Empire State Building? No! To lift Mount Everest? No! The repulsion would be enough to lift a “weight” equal to that of the entire earth!”
So… Well… That’s it. I’ll close this post with the promised note on Coulomb’s constant and the electric constant, but it’s just an addendum, so you don’t have to read it if you don’t feel like it, Vincent. 🙂
Addendum: Coulomb’s constant and the electric constant
The ke = 1/4πε0 factor in Coulomb’s Law is just a constant of proportionality. Coulomb’s formula is simple enough – it says that the force is directly proportional to the amount of charge and inversely proportional to the square of the distance – but it would be a miracle if the units came out alright, wouldn’t it? Indeed, we measure distance in meter, charge in coulomb, and force in newton. Now, we could re-define one of those units so as to get rid of the 1/4πε0 factor, but so that’s not what we’re going to do. Why not? First, the constant of proportionality depends on the medium. Indeed, ε0 is the so-called permittivity in a vacuum, so that’s in empty space. The constant of proportionality will be different in a gas, and it will be different for different gases and different temperatures and at different pressure. You can check it online if you want – just click the link here for some examples – but I guess you’ll believe me. So, if we write 1/4πε instead of ke then we can put in a different ε for each medium and our formula is still OK.
Now, because you’re a smart kid, you’ll say that doesn’t quite answer the question: why do we write is as 1/4πε? Why don’t we simply write μ instead of 1/4πε, or just k or a or something? Well… There is an answer to that, but it’s complicated. First, the μ and μ0 symbols are already used for something else: it’s something similar as ε and ε0 but then for magnetic fields. To be precise, μ0 is referred to as the permeability of the vacuum (and μ is just the permeability of some non-vacuum medium, of course). Now, because electricity and magnetism are part of one and the same phenomenon in Nature (when you’re going for engineer, you’ll get one course on electromagnetism, not two separate ones), ε0 are μ0 related. In fact, they’re related through a marvelous formulas—a formula like E = mc2 in physics or, in math, eiπ+ 1 = 0. Don’t try to understand it. Just look at it:
c2ε0μ0 = (cε0)(cμ0) = 1
Amazing, isn’t it? The c here is the speed of light in a vacuum, obviously. So it’s a physical constant. In other words, unlike ε0 or μ0, it’s got nothing to do with proportionality or units: the speed of light is the speed of light no matter what units we use—meters or light-seconds or whatever. OK. Just swallow this and don’t pay too much attention. It’s just a digression, but let me finish it.
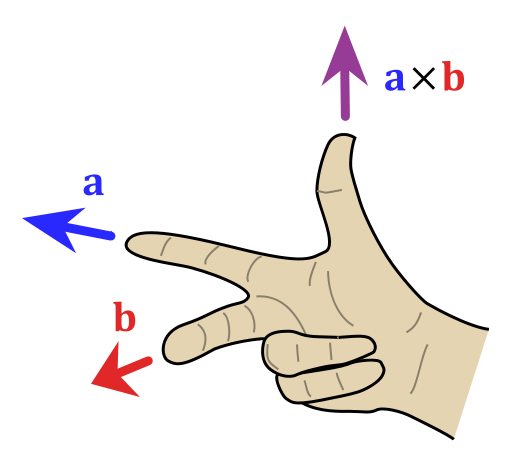
The equivalent of Coulomb’s Law in magnetism is Ampère’s Law, and it involves the circulation of a field, as illustrated below. So that’s why Ampère’s Law involves a 2π factor.

In fact, because we’re talking two wires (or two conductors) with currents going through them (I1 and I2 respectively), the proportionality constant in Ampère’s Law is written as 2kA.
![]()
Now, I won’t go too much into the detail but the thing about the circulation and that factor 2 in Ampère’s Law result in μ0 being written as μ0 = 4π×10–7 N/A2. As for the units: N is newton and A is ampere obviously. And so that’s why we have the 4π in the proportionality constant for Coulomb’s Law as well. And, of course, the (cε0)(cμ0) = 1 equation makes it obvious that cε0 and cμ0 are reciprocal numbers, so that’s why we write 1/4πε0 for the proportionality constant in Coulomb’s Law, rather than ke or a or whatever other simple thing. […] Well… Sort of. In any case, nothing to worry about. 🙂
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:
https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here: