
Pre-script (dated 26 June 2020): This post got mutilated by the removal of some material by the dark force. You should be able to follow the main story line, however. If anything, the lack of illustrations might actually help you to think things through for yourself. In any case, we now have different views on these concepts as part of our realist interpretation of quantum mechanics, so we recommend you read our recent papers instead of these old blog posts.
Original post:
Some say it is not possible to fully understand quantum-mechanical spin. Now, I do agree it is difficult, but I do not believe it is impossible. That’s why I wrote so many posts on it. Most of these focused on elaborating how the classical view of how a rotating charge precesses in a magnetic field might translate into the weird world of quantum mechanics. Others were more focused on the corollary of the quantization of the angular momentum, which is that, in the quantum-mechanical world, the angular momentum is never quite all in one direction only—so that explains some of the seemingly inexplicable randomness in particle behavior.
Frankly, I think those explanations help us quite a bit already but… Well… We need to go the extra mile, right? In fact, that’s drives my search for a geometric (or physical) interpretation of the wavefunction: the extra mile. 🙂
Now, in one of these many posts on spin and angular momentum, I advise my readers – you, that is – to try to work yourself through Feynman’s 6th Lecture on quantum mechanics, which is highly abstract and, therefore, usually skipped. [Feynman himself told his students to skip it, so I am sure that’s what they did.] However, if we believe the physical (or geometric) interpretation of the wavefunction that we presented in previous posts is, somehow, true, then we need to relate it to the abstract math of these so-called transformations between representations. That’s what we’re going to try to do here. It’s going to be just a start, and I will probably end up doing several posts on this but… Well… We do have to start somewhere, right? So let’s see where we get today. 🙂
The thought experiment that Feynman uses throughout his Lecture makes use of what Feynman’s refers to as modified or improved Stern-Gerlach apparatuses. They allow us to prepare a pure state or, alternatively, as Feynman puts it, to analyze a state. In theory, that is. The illustration below present a side and top view of such apparatus. We may already note that the apparatus itself—or, to be precise, our perspective of it—gives us two directions: (1) the up direction, so that’s the positive direction of the z-axis, and (2) the direction of travel of our particle, which coincides with the positive direction of the y-axis. [This is obvious and, at the same time, not so obvious, but I’ll talk about that in my next post. In this one, we basically need to work ourselves through the math, so we don’t want to think too much about philosophical stuff.]

The kind of questions we want to answer in this post are variants of the following basic one: if a spin-1/2 particle (let’s think of an electron here, even if the Stern-Gerlach experiment is usually done with an atomic beam) was prepared in a given condition by one apparatus S, say the +S state, what is the probability (or the amplitude) that it will get through a second apparatus T if that was set to filter out the +T state?
The result will, of course, depend on the angles between the two apparatuses S and T, as illustrated below. [Just to respect copyright, I should explicitly note here that all illustrations are taken from the mentioned Lecture, and that the line of reasoning sticks close to Feynman’s treatment of the matter too.]
We should make a few remarks here. First, this thought experiment assumes our particle doesn’t get lost. That’s obvious but… Well… If you haven’t thought about this possibility, I suspect you will at some point in time. So we do assume that, somehow, this particle makes a turn. It’s an important point because… Well… Feynman’s argument—who, remember, represents mainstream physics—somehow assumes that doesn’t really matter. It’s the same particle, right? It just took a turn, so it’s going in some other direction. That’s all, right? Hmm… That’s where I part ways with mainstream physics: the transformation matrices for the amplitudes that we’ll find here describe something real, I think. It’s not just perspective: something happened to the electron. That something does not only change the amplitudes but… Well… It describes a different electron. It describes an electron that goes in a different direction now. But… Well… As said, these are reflections I will further develop in my next post. 🙂 Let’s focus on the math here. The philosophy will follow later. 🙂 Next remark.
Second, we assume the (a) and (b) illustrations above represent the same physical reality because the relative orientation between the two apparatuses, as measured by the angle α, is the same. Now that is obvious, you’ll say, but, as Feynman notes, we can only make that assumption because experiments effectively confirm that spacetime is, effectively, isotropic. In other words, there is no aether allowing us to establish some sense of absolute direction. Directions are relative—relative to the observer, that is… But… Well… Again, in my next post, I’ll argue that it’s not because directions are relative that they are, somehow, not real. Indeed, in my humble opinion, it does matter whether an electron goes here or, alternatively, there. These two different directions are not just two different coordinate frames. But… Well… Again. The philosophy will follow later. We need to stay focused on the math here.
Third and final remark. This one is actually very tricky. In his argument, Feynman also assumes the two set-ups below are, somehow, equivalent.
You’ll say: Huh? If not, say it! Huh? 🙂 Yes. Good. Huh? Feynman writes equivalent—not the same because… Well… They’re not the same, obviously:
- In the first set-up (a), T is wide open, so the apparatus is not supposed to do anything with the beam: it just splits and re-combines it.
- In set-up (b) the T apparatus is, quite simply, not there, so… Well… Again. Nothing is supposed to happen with our particles as they come out of S and travel to U.
The fundamental idea here is that our spin-1/2 particle (again, think of an electron here) enters apparatus U in the same state as it left apparatus S. In both set-ups, that is! Now that is a very tricky assumption, because… Well… While the net turn of our electron is the same, it is quite obvious it has to take two turns to get to U in (a), while it only takes one turn in (b). And so… Well… You can probably think of other differences too. So… Yes. And no. Same-same but different, right? 🙂
Right. That is why Feynman goes out of his way to explain the nitty-gritty behind: he actually devotes a full page in small print on this, which I’ll try to summarize in just a few paragraphs here. [And, yes, you should check my summary against Feynman’s actual writing on this.] It’s like this. While traveling through apparatus T in set-up (a), time goes by and, therefore, the amplitude would be different by some phase factor δ. [Feynman doesn’t say anything about this, but… Well… In the particle’s own frame of reference, this phase factor depend on the energy, the momentum and the time and distance traveled. Think of the argument of the elementary wavefunction here: θ = (E∙t – p∙x)/ħ).] Now, if we believe that the amplitude is just some mathematical construct—so that’s what mainstream physicists (not me!) believe—then we could effectively say that the physics of (a) and (b) are the same, as Feynman does. In fact, let me quote him here:
“The physics of set-up (a) and (b) should be the same but the amplitudes could be different by some phase factor without changing the result of any calculation about the real world.”
Hmm… It’s one of those mysterious short passages where we’d all like geniuses like Feynman (or Einstein, or whomever) to be more explicit on their world view: if the amplitudes are different, can the physics really be the same? I mean… Exactly the same? It all boils down to that unfathomable belief that, somehow, the particle is real but the wavefunction that describes it, is not. Of course, I admit that it’s true that choosing another zero point for the time variable would also change all amplitudes by a common phase factor and… Well… That’s something that I consider to be not real. But… Well… The time and distance traveled in the T apparatus is the time and distance traveled in the T apparatus, right?
Bon… I have to stay away from these questions as for now—we need to move on with the math here—but I will come back to it later. But… Well… Talking math, I should note a very interesting mathematical point here. We have these transformation matrices for amplitudes, right? Well… Not yet. In fact, the coefficient of these matrices are exactly what we’re going to try to derive in this post, but… Well… Let’s assume we know them already. 🙂 So we have a 2-by-2 matrix to go from S to T, from T to U, and then one to go from S to U without going through T, which we can write as RST, RTU, and RSU respectively. Adding the subscripts for the base states in each representation, the equivalence between the (a) and (b) situations can then be captured by the following formula:
![]()
So we have that phase factor here: the left- and right-hand side of this equation is, effectively, same-same but different, as they would say in Asia. 🙂 Now, Feynman develops a beautiful mathematical argument to show that the eiδ factor effectively disappears if we convert our rotation matrices to some rather special form that is defined as follows:
![]()
I won’t copy his argument here, but I’d recommend you go over it because it is wonderfully easy to follow and very intriguing at the same time. [Yes. Simple things can be very intriguing.] Indeed, the calculation below shows that the determinant of these special rotation matrices will be equal to 1.

So… Well… So what? You’re right. I am being sidetracked here. The point is that, if we put all of our rotation matrices in this special form, the eiδ factor vanishes and the formula above reduces to:
![]()
So… Yes. End of excursion. Let us remind ourselves of what it is that we are trying to do here. As mentioned above, the kind of questions we want to answer will be variants of the following basic one: if a spin-1/2 particle was prepared in a given condition by one apparatus (S), say the +S state, what is the probability (or the amplitude) that it will get through a second apparatus (T) if that was set to filter out the +T state?
We said the result would depend on the angles between the two apparatuses S and T. I wrote: angles—plural. Why? Because a rotation will generally be described by the three so-called Euler angles: α, β and γ. Now, it is easy to make a mistake here, because there is a sequence to these so-called elemental rotations—and right-hand rules, of course—but I will let you figure that out. 🙂
The basic idea is the following: if we can work out the transformation matrices for each of these elemental rotations, then we can combine them and find the transformation matrix for any rotation. So… Well… That fills most of Feynman’s Lecture on this, so we don’t want to copy all that. We’ll limit ourselves to the logic for a rotation about the z-axis, and then… Well… You’ll see. 🙂
So… The z-axis… We take that to be the direction along which we are measuring the angular momentum of our electron, so that’s the direction of the (magnetic) field gradient, so that’s the up-axis of the apparatus. In the illustration below, that direction points out of the page, so to speak, because it is perpendicular to the direction of the x– and the y-axis that are shown. Note that the y-axis is the initial direction of our beam.
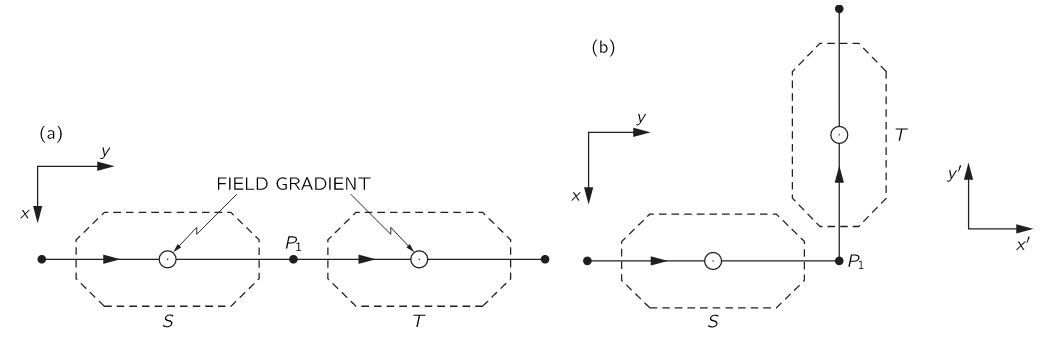
Now, because the (physical) orientation of the fields and the field gradients of S and T is the same, Feynman says that—despite the angle—the probability for a particle to be up or down with regard to S and T respectively should be the same. Well… Let’s be fair. He does not only say that: experiment shows it to be true. [Again, I am tempted to interject here that it is not because the probabilities for (a) and (b) are the same, that the reality of (a) and (b) is the same, but… Well… You get me. That’s for the next post. Let’s get back to the lesson here.] The probability is, of course, the square of the absolute value of the amplitude, which we will denote as C+, C−, C’+, and C’− respectively. Hence, we can write the following:
![]()
Now, the absolute values (or the magnitudes) are the same, but the amplitudes may differ. In fact, they must be different by some phase factor because, otherwise, we would not be able to distinguish the two situations, which are obviously different. As Feynman, finally, admits himself—jokingly or seriously: “There must be some way for a particle to know that it has turned the corner at P1.” [P1 is the midway point between S and T in the illustration, of course—not some probability.]
So… Well… We write:
C’+ = eiλ ·C+ and C’− = eiμ ·C−
![]()
Now, it shouldn’t you too long to figure out that λ’ is equal to λ’ = λ/2 + μ/2 = −μ’. So… Well… Then we can just adopt the convention that λ = −μ. So our C’+ = eiλ ·C+ and C’− = eiμ ·C− equations can now be written as:
C’+ = eiλ ·C+ and C’− = e−iλ·C−
The absolute values are the same, but the phases are different. Right. OK. Good move. What’s next?
Well… The next assumption is that the phase shift λ is proportional to the angle (α) between the two apparatuses. Hence, λ is equal to λ = m·α, and we can re-write the above as:
C’+ = eimα·C+ and C’− = e−imα·C−
Now, this assumption may or may not seem reasonable. Feynman justifies it with a continuity argument, arguing any rotation can be built up as a sequence of infinitesimal rotations and… Well… Let’s not get into the nitty-gritty here. [If you want it, check Feynman’s Lecture itself.] Back to the main line of reasoning. So we’ll assume we can write λ as λ = m·α. The next question then is: what is the value for m? Now, we obviously do get exactly the same physics if we rotate T by 360°, or 2π radians. So we might conclude that the amplitudes should be the same and, therefore, that eimα = eim·2π has to be equal to one, so C’+ = C+ and C’− = C− . That’s the case if m is equal to 1. But… Well… No. It’s the same thing again: the probabilities (or the magnitudes) have to be the same, but the amplitudes may be different because of some phase factor. In fact, they should be different. If m = 1/2, then we also get the same physics, even if the amplitudes are not the same. They will be each other’s opposite:
Huh? Yes. Think of it. The coefficient of proportionality (m) cannot be equal to 1. If it would be equal to 1, and we’d rotate T by 180° only, then we’d also get those C’+ = −C+ and C’− = −C− equations, and so these coefficients would, therefore, also describe the same physical situation. Now, you will understand, intuitively, that a rotation of the T apparatus by 180° will not give us the same physical situation… So… Well… In case you’d want a more formal argument proving a rotation by 180° does not give us the same physical situation, Feynman has one for you. 🙂
I know that, by now, you’re totally tired and bored, and so you only want the grand conclusion at this point. Well… All of what I wrote above should, hopefully, help you to understand that conclusion, which – I quote Feynman here – is the following:
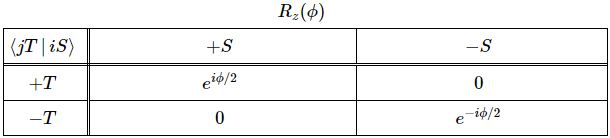
If we know the amplitudes C+ and C− of spin one-half particles with respect to a reference frame S, and we then use new base states, defined with respect to a reference frame T which is obtained from S by a rotation α around the z-axis, the new amplitudes are given in terms of the old by the following formulas:
[Feynman denotes our angle α by phi (φ) because… He uses the Euler angles a bit differently. But don’t worry: it’s the same angle.]
What about the amplitude to go from the C− to the C’+ state, and from the C+ to the C’− state? Well… That amplitude is zero. So the transformation matrix is this one:
Let’s take a moment and think about this. Feynman notes the following, among other things: “It is very curious to say that if you turn the apparatus 360° you get new amplitudes. [They aren’t really new, though, because the common change of sign doesn’t give any different physics.] But if something has been rotated by a sequence of small rotations whose net result is to return it to the original orientation, then it is possible to define the idea that it has been rotated 360°—as distinct from zero net rotation—if you have kept track of the whole history.”
This is very deep. It connects space and time into one single geometric space, so to speak. But… Well… I’ll try to explain this rather sweeping statement later. Feynman also notes that a net rotation of 720° does give us the same amplitudes and, therefore, cannot be distinguished from the original orientation. Feynman finds that intriguing but… Well… I am not sure if it’s very significant. I do note some symmetries in quantum physics involve 720° rotations but… Well… I’ll let you think about this. 🙂
Note that the determinant of our matrix is equal to a·d − b·c = eiφ/2·e−iφ/2 = 1. So… Well… Our rotation matrix is, effectively, in that special form! How comes? Well… When equating λ = −μ, we are effectively putting the transformation into that special form. Let us also, just for fun, quickly check the normalization condition. It requires that the probabilities, in any given representation, add to up to one. So… Well… Do they? When they come out of S, our electrons are equally likely to be in the up or down state. So the amplitudes are 1/√2. [To be precise, they are ±1/√2 but… Well… It’s the phase factor story once again.] That’s normalized: |1/√2|2 + |1/√2|2 = 1. The amplitudes to come out of the T apparatus in the up or down state are eiφ/2/√2 and eiφ/2/√2 respectively, so the probabilities add up to |eiφ/2/√2|2 + |e−iφ/2/√2|2 = … Well… It’s 1. Check it. 🙂
Let me add an extra remark here. The normalization condition will result in matrices whose determinant will be equal to some pure imaginary exponential, like eiα. So is that what we have here? Yes. We can re-write 1 as 1 = ei·0 = e0, so α = 0. 🙂 Capito? Probably not, but… Well… Don’t worry about it. Just think about the grand results. As Feynman puts it, this Lecture is really “a sort of cultural excursion.” 🙂
Let’s do a practical calculation here. Let’s suppose the angle is, effectively, 180°. So the eiφ/2 and e−iφ/2/√2 factors are equal to eiπ/2 = +i and e−iπ/2 = −i, so… Well… What does that mean—in terms of the geometry of the wavefunction? Hmm… We need to do some more thinking about the implications of all this transformation business for our geometric interpretation of he wavefunction, but so we’ll do that in our next post. Let us first work our way out of this rather hellish transformation logic. 🙂 [See? I do admit it is all quite difficult and abstruse, but… Well… We can do this, right?]
So what’s next? Well… Feynman develops a similar argument (I should say same-same but different once more) to derive the coefficients for a rotation of ±90° around the y-axis. Why 90° only? Well… Let me quote Feynman here, as I can’t sum it up more succinctly than he does: “With just two transformations—90° about the y-axis, and an arbitrary angle about the z-axis [which we described above]—we can generate any rotation at all.”
So how does that work? Check the illustration below. In Feynman’s words again: “Suppose that we want the angle α around x. We know how to deal with the angle α α around z, but now we want it around x. How do we get it? First, we turn the axis z down onto x—which is a rotation of +90°. Then we turn through the angle α around x = z’. Then we rotate −90° about y”. The net result of the three rotations is the same as turning around x by the angle α. It is a property of space.”
Besides helping us greatly to derive the transformation matrix for any rotation, the mentioned property of space is rather mysterious and deep. It sort of reduces the degrees of freedom, so to speak. Feynman writes the following about this:
“These facts of the combinations of rotations, and what they produce, are hard to grasp intuitively. It is rather strange, because we live in three dimensions, but it is hard for us to appreciate what happens if we turn this way and then that way. Perhaps, if we were fish or birds and had a real appreciation of what happens when we turn somersaults in space, we could more easily appreciate such things.”
In any case, I should limit the number of philosophical interjections. If you go through the motions, then you’ll find the following elemental rotation matrices:
What about the determinants of the Rx(φ) and Ry(φ) matrices? They’re also equal to one, so… Yes. A pure imaginary exponential, right? 1 = ei·0 = e0. 🙂
What’s next? Well… We’re done. We can now combine the elemental transformations above in a more general format, using the standardized Euler angles. Again, just go through the motions. The Grand Result is:
Does it give us normalized amplitudes? It should, but it looks like our determinant is going to be a much more complicated complex exponential. 🙂 Hmm… Let’s take some time to mull over this. As promised, I’ll be back with more reflections in my next post.
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:
https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 16, 2020 as a result of a DMCA takedown notice from The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 17, 2020 as a result of a DMCA takedown notice from Michael A. Gottlieb, Rudolf Pfeiffer, and The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 17, 2020 as a result of a DMCA takedown notice from Michael A. Gottlieb, Rudolf Pfeiffer, and The California Institute of Technology. You can learn more about the DMCA here:https://wordpress.com/support/copyright-and-the-dmca/
Some content on this page was disabled on June 17, 2020 as a result of a DMCA takedown notice from Michael A. Gottlieb, Rudolf Pfeiffer, and The California Institute of Technology. You can learn more about the DMCA here:
