
In my previous post, I promised to do something on symmetries. Something simple but then… Well… You know how it goes: one question always triggers another one. 🙂
Look at the situation in the illustration on the left below. We suppose we have something real going on there: something is moving from left to right (so that’s in the 3 o’clock direction), and then something else is going around clockwise (so that’s not the direction in which we measure angles (which also include the argument θ of our wavefunction), because that’s always counter-clockwise, as I note at the bottom of the illustration). To be precise, we should note that the angular momentum here is all about the y-axis, so the angular momentum vector L points in the (positive) y-direction. We get that direction from the familiar right-hand rule, which is illustrated in the top right corner.
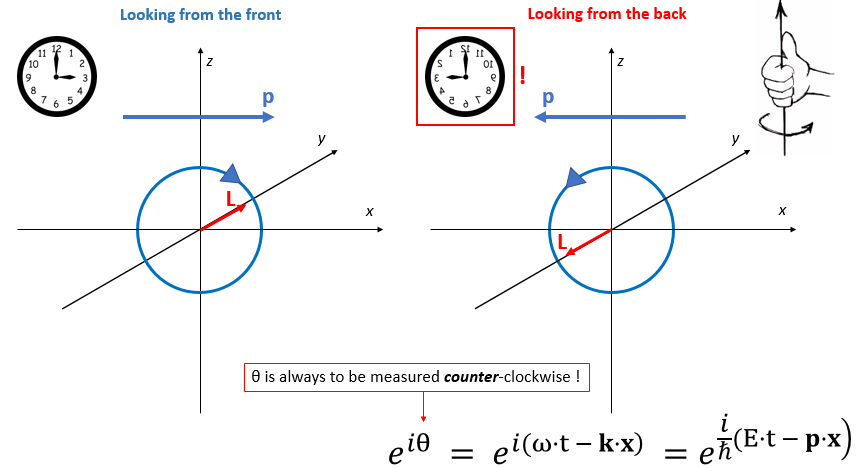 Now, suppose someone else is looking at this from the other side – or just think of yourself going around a full 180° to look at the same thing from the back side. You’ll agree you’ll see the same thing going from right to left (so that’s in the 9 o’clock direction now – or, if our clock is transparent, the 3 o’clock direction of our reversed clock). Likewise, the thing that’s turning around will now go counter-clockwise.
Now, suppose someone else is looking at this from the other side – or just think of yourself going around a full 180° to look at the same thing from the back side. You’ll agree you’ll see the same thing going from right to left (so that’s in the 9 o’clock direction now – or, if our clock is transparent, the 3 o’clock direction of our reversed clock). Likewise, the thing that’s turning around will now go counter-clockwise.
Note that both observers – so that’s me and that other person (or myself after my walk around this whole thing) – use a regular coordinate system, which implies the following:
- We’ve got regular 90° degree angles between our coordinates axes.
- Our x-axis goes from negative to positive from left to right, and our y-axis does the same going away from us.
- We also both define our z-axis using, once again, the ubiquitous right-hand rule, so our z-axis points upwards.
So we have two observers looking at the same reality – some linear as well as some angular momentum – but from opposite sides. And so we’ve got a reversal of both the linear as well as the angular momentum. Not in reality, of course, because we’re looking at the same thing. But we measure it differently. Indeed, if we use the subscripts 1 and 2 to denote the measurements in the two coordinate systems, we find that p2 = –p1. Likewise, we also find that L2 = –L1.
Now, when you see these two equations, you will probably not worry about that p2 = –p1 equation – although you should, because it’s actually only valid for this rather particular orientation of the linear momentum (I’ll come back to that in a moment). It’s the L2 = –L1 equation which should surprise you most. Why? Because you’ve always been told there is a big difference between (1) real vectors (aka polar vectors), like the momentum p, or the velocity v, or the force F, and (2) pseudo-vectors (aka axial vectors), like the angular momentum L. You may also remember how to distinguish between the two: if you change the direction of the axes of your reference frame, polar vectors will change sign too, as opposed to axial vectors: axial vectors do not swap sign if we swap the coordinate signs.
So… Well… How does that work here? In fact, what we should ask ourselves is: why does that not work here? Well… It’s simple, really. We’re not changing the direction of the axes here. Or… Well… Let me be more precise: we’re only swapping the sign of the x– and y-axis. We did not flip the z-axis. So we turned things around, but we didn’t turn them upside down. It makes a huge difference. Note, for example, that if all of the linear momentum would have been in the z-direction only (so our p vector would have been pointing in the z-direction, and in the z-direction only), it would not swap sign. The illustration below shows what really happens with the coordinates of some vector when we’re doing a rotation. It’s, effectively, only the x– and y-coordinates that flip sign.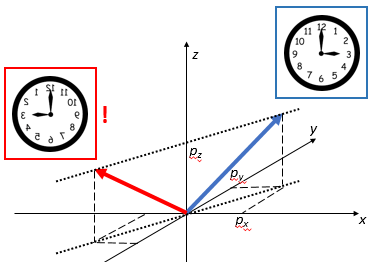
It’s easy to see that this rotation about the z-axis here preserves our deep sense of ‘up’ versus ‘down’, but that it swaps ‘left’ for ‘right’, and vice versa. Note that this is not a reflection. We are not looking at some mirror world here. The difference between a reflection (a mirror world) and a rotation (the real world seen from another angle) is illustrated below. It’s quite confusing but, unlike what you might think, a reflection does not swap left for right. It does turn things inside out, but that’s what a rotation does as well: near becomes far, and far becomes near.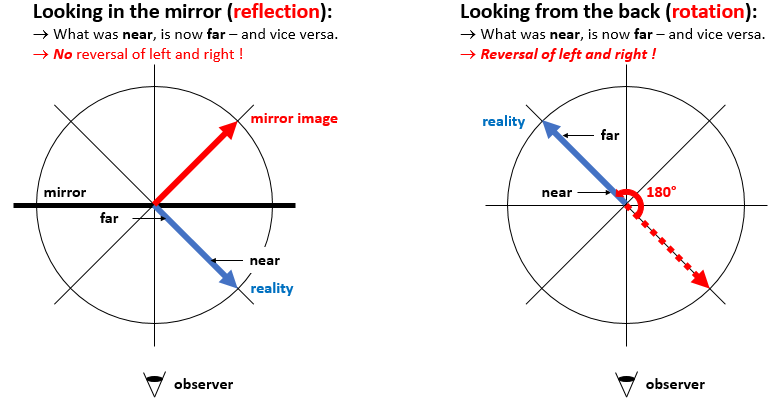
Before we move on, let me say a few things about the mirror world and, more in particular, about the obvious question: could it possibly exist? Well… What do you think? Your first reaction might well be: “Of course! What nonsense question! We just walk around whatever it is that we’re seeing – or, what amounts to the same, we just turn it around – and there it is: that’s the mirror world, right? So of course it exists!” Well… No. That’s not the mirror world. That’s just the real world seen from the opposite direction, and that world… Well… That’s just the real world. 🙂 The mirror world is, literally, the world in the mirror – like the photographer in the illustration below. We don’t swap left for right here: some object going from left to right in the real world is still going from left to right in the mirror world! Of course, you may now involve the photographer in the picture above and observe – note that you’re now an observer of the observer of the mirror 🙂 – that, if he would move his left arm in the real world, the photographer in the mirror world would be moving his right arm. But… Well… No. You’re saying that because you’re now imaging that you’re the photographer in the mirror world yourself now, who’s looking at the real world from inside, so to speak. So you’ve rotated the perspective in your mind and you’re saying it’s his right arm because you imagine yourself to be the photographer in the mirror. We usually do that because… Well… Because we look in a mirror every day, right? So we’re used to seeing ourselves that way and we always think it’s us we’re seeing. 🙂 However, the illustration above is correct: the mirror world only swaps near for far, and far for near, so it only swaps the sign of the y-axis.
Of course, you may now involve the photographer in the picture above and observe – note that you’re now an observer of the observer of the mirror 🙂 – that, if he would move his left arm in the real world, the photographer in the mirror world would be moving his right arm. But… Well… No. You’re saying that because you’re now imaging that you’re the photographer in the mirror world yourself now, who’s looking at the real world from inside, so to speak. So you’ve rotated the perspective in your mind and you’re saying it’s his right arm because you imagine yourself to be the photographer in the mirror. We usually do that because… Well… Because we look in a mirror every day, right? So we’re used to seeing ourselves that way and we always think it’s us we’re seeing. 🙂 However, the illustration above is correct: the mirror world only swaps near for far, and far for near, so it only swaps the sign of the y-axis.
So the question is relevant: could the mirror world actually exist? What we’re really asking here is the following: can we swap the sign of one coordinate axis only in all of our physical laws and equations and… Well… Do we then still get the same laws and equations? Do we get the same Universe – because that’s what those laws and equations describe? If so, our mirror world can exist. If not, then not.
Now, I’ve done a post on that, in which I explain that mirror world can only exist if it would consist of anti-matter. So if our real world and the mirror world would actually meet, they would annihilate each other. 🙂 But that post is quite technical. Here I want to keep it very simple: I basically only want to show what the rotation operation implies for the wavefunction. There is no doubt whatsoever that the rotated world exists. In fact, the rotated world is just our world. We walk around some object, or we turn it around, but so we’re still watching the same object. So we’re not thinking about the mirror world here. We just want to know how things look like when adopting some other perspective.
So, back to the starting point: we just have two observers here, who look at the same thing but from opposite directions. Mathematically, this corresponds to a rotation of our reference frame about the z-axis of 180°. Let me spell out – somewhat more precisely – what happens to the linear and angular momentum here:
- The direction of the linear momentum in the xy-plane swaps direction.
- The angular momentum about the y-axis, as well as about the x-axis, swaps direction too.
Note that the illustration only shows angular momentum about the y-axis, but you can easily verify the statement about the angular momentum about the x-axis. In fact, the angular momentum about any line in the xy-plane will swap direction.
Of course, the x-, y-, z-axes in the other reference frame are different than mine, and so I should give them a subscript, right? Or, at the very least, write something like x’, y’, z’, so we have a primed reference frame here, right? Well… Maybe. Maybe not. Think about it. 🙂 A coordinate system is just a mathematical thing… Only the momentum is real… Linear or angular… Equally real… And then Nature doesn’t care about our position, does it? So… Well… No subscript needed, right? Or… Well… What do you think? 🙂
It’s just funny, isn’t it? It looks like we can’t really separate reality and perception here. Indeed, note how our p2 = –p1 and L2 = –L1 equations already mix reality with how we perceive it. It’s the same thing in reality but the coordinates of p1 and L1 are positive, while the coordinates of p2 and L2 are negative. To be precise, these coordinates will look like this:
- p1 = (p, 0, 0) and L1 = (0, L, 0)
- p2 = (−p, 0, 0) and L1 = (0, −L, 0)
So are they two different things or are they not? 🙂 Think about it. I’ll move on in the meanwhile. 🙂
Now, you probably know a thing or two about parity symmetry, or P-symmetry: if if we flip the sign of all coordinates, then we’ll still find the same physical laws, like F = m·a and what have you. [It works for all physical laws, including quantum-mechanical laws – except those involving the weak force (read: radioactive decay processes).] But so here we are talking rotational symmetry. That’s not the same as P-symmetry. If we flip the signs of all coordinates, we’re also swapping ‘up’ for ‘down’, so we’re not only turning around, but we’re also getting upside down. The difference between rotational symmetry and P-symmetry is shown below.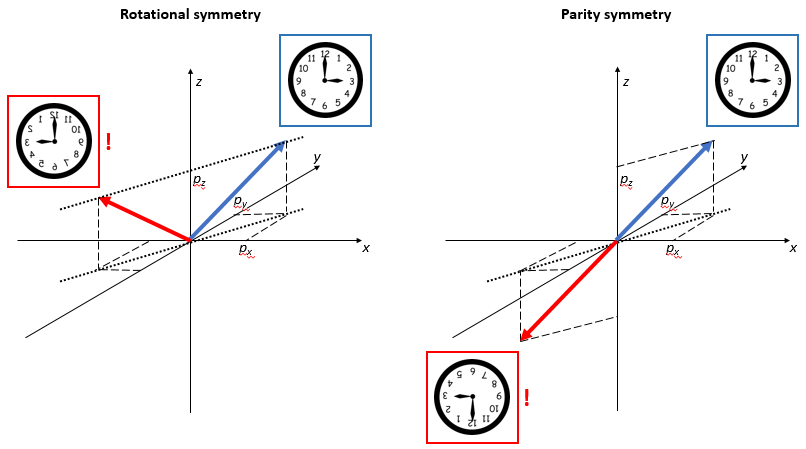
As mentioned, we’ve talked about P-symmetry at length in other posts, and you can easily google a lot more on that. The question we want to examine here – just as a fun exercise – is the following:
How does that rotational symmetry work for a wavefunction?
The very first illustration in this post gave you the functional form of the elementary wavefunction eiθ = ei·(E·t – p·x)/ħ. We should actually use a bold type x = (x, y, z) in this formula but we’ll assume we’re talking something similar to that p vector: something moving in the x-direction only – or in the xy-plane only. The z-component doesn’t change. Now, you know that we can reduce all actual wavefunctions to some linear combination of such elementary wavefunctions by doing a Fourier decomposition, so it’s fine to look at the elementary wavefunction only – so we don’t make it too complicated here. Now think of the following.
The energy E in the eiθ = ei·(E·t – p·x)/ħ function is a scalar, so it doesn’t have any direction and we’ll measure it the same from both sides – as kinetic or potential energy or, more likely, by adding both. But… Well… Writing ei·(E·t – p·x)/ħ or ei·(E·t + p·x)/ħ is not the same, right? No, it’s not. However, think of it as follows: we won’t be changing the direction of time, right? So it’s OK to not change the sign of E. In fact, we can re-write the two expressions as follows:
- ei·(E·t – p·x)/ħ = ei·(E/ħ)·t·e–i·(p/ħ)·x
- ei·(E·t + p·x)/ħ = ei·(E/ħ)·t·ei·(p/ħ)·x
The first wavefunction describes some particle going in the positive x-direction, while the second wavefunction describes some particle going in the negative x-direction, so… Well… That’s exactly what we see in those two reference frames, so there is no issue whatsoever. 🙂 It’s just… Well… I just wanted to show the wavefunction does look different too when looking at something from another angle.
So why am I writing about this? Why am I being fussy? Well.. It’s just to show you that those transformations are actually quite natural – just as natural as it is to see some particle go in one direction in one reference frame and see it go in the other in the other. 🙂 It also illustrates another point that I’ve been trying to make: the wavefunction is something real. It’s not just a figment of our imagination. The real and imaginary part of our wavefunction have a precise geometrical meaning – and I explained what that might be in my more speculative posts, which I’ve brought together in the Deep Blue page of this blog. But… Well… I can’t dwell on that here because… Well… You should read that page. 🙂
The point to note is the following: we do have different wavefunctions in different reference frames, but these wavefunctions describe the same physical reality, and they also do respect the symmetries we’d expect them to respect, except… Well… The laws describing the weak force don’t, but I wrote about that a very long time ago, and it was not in the context of trying to explain the relatively simple basic laws of quantum mechanics. 🙂 If you’re interested, you should check out my post(s) on that or, else, just google a bit. It’s really exciting stuff, but not something that will help you much to understand the basics, which is what we’re trying to do here. 🙂
The second point to note is that those transformations of the wavefunction – or of quantum-mechanical states – which we go through when rotating our reference frame, for example – are really quite natural. There’s nothing special about them. We had such transformations in classical mechanics too! But… Well… Yes, I admit they do look complicated. But then that’s why you’re so fascinated and why you’re reading this blog, isn’t it? 🙂
Post scriptum: It’s probably useful to be somewhat more precise on all of this. You’ll remember we visualized the wavefunction in some of our posts using the animation below. It uses a left-handed coordinate system, which is rather unusual but then it may have been made with a software which uses a left-handed coordinate system (like RenderMan, for example). Now the rotating arrow at the center moves with time and gives us the polarization of our wave. Applying our customary right-hand rule,you can see this beam is left-circularly polarized. [I know… It’s quite confusing, but just go through the motions here and be consistent.] Now, you know that e–i·(p/ħ)·x and e–i·(p/ħ)·x are each other’s complex conjugate:
Now, you know that e–i·(p/ħ)·x and e–i·(p/ħ)·x are each other’s complex conjugate:
- e–i·k·x = cos(k·x) + i·sin(k·x)
- e–i·k·x = cos(-k·x) + i·sin(-k·x) = cos(k·x) − i·sin(k·x)
Their real part – the cosine function – is the same, but the imaginary part – the sine function – has the opposite sign. So, assuming the direction of propagation is, effectively, the x-direction, then what’s the polarization of the mirror image? Well… The wave will now go from right to left, and its polarization… Hmm… Well… What?
Well… If you can’t figure it out, then just forget about those signs and just imagine you’re effectively looking at the same thing from the backside. In fact, if you have a laptop, you can push the screen down and go around your computer. 🙂 There’s no shame in that. In fact, I did that just to make sure I am not talking nonsense here. 🙂 If you look at this beam from the backside, you’ll effectively see it go from right to left – instead of from what you see on this side, which is a left-to-right direction. And as for its polarization… Well… The angular momentum vector swaps direction too but the beam is still left-circularly polarized. So… Well… That’s consistent with what we wrote above. 🙂 The real world is real, and axial vectors are as real as polar vectors. This real beam will only appear to be right-circularly polarized in a mirror. Now, as mentioned above, that mirror world is not our world. If it would exist – in some other Universe – then it would be made up of anti-matter. 🙂
So… Well… Might it actually exist? Is there some other world made of anti-matter out there? I don’t know. We need to think about that reversal of ‘near’ and ‘far’ too: as mentioned, a mirror turns things inside out, so to speak. So what’s the implication of that? When we walk around something – or do a rotation – then the reversal between ‘near’ and ‘far’ is something physical: we go near to what was far, and we go away from what was near. But so how would we get into our mirror world, so to speak? We may say that this anti-matter world in the mirror is entirely possible, but then how would we get there? We’d need to turn ourselves, literally, inside out – like short of shrink to the zero point and then come back out of it to do that parity inversion along our line of sight. So… Well… I don’t see that happen, which is why I am a fan of the One World hypothesis. 🙂 So I think the mirror world is just what it is: the mirror world. Nothing real. But… Then… Well… What do you think? 🙂

3 thoughts on “Symmetries and transformations”