Pre-scriptum (dated 26 June 2020): While my posts on symmetries (and why they may or may be broken) are somewhat mutilated (removal of illustrations and other material) as a result of an attack by the dark force, I am happy to see a lot of it survived more or less intact. While my views on the true nature of light, matter and the force or forces that act on them – all of the stuff that explains symmetries or symmetry-breaking, in other words – have evolved significantly as part of my explorations of a more realist (classical) explanation of quantum mechanics, I think most (if not all) of the analysis in this post remains valid and fun to read. 🙂
Original post:
In my previous posts, I introduced the concept of time symmetry, and parity and charge symmetry as well. However, let’s try to explore T-symmetry first. It’s not an easy concept – contrary to what one might think at first.
The arrow of time
Let me start with a very ‘common-sense’ introduction. What do we see when we play a movie backwards? […]
We reverse time. When playing some movie backwards, we look at where things are coming from. And we see phenomena that don’t make sense, such as: (i) cars racing backwards, (ii) old people becoming younger (and dead people coming back to life), (iii) shattered glass assembling itself back into some man-made shape, and (iv) falling objects defying gravity to get back to where they were. Let’s briefly say something about these unlikely or even impossible phenomena before a more formal treatment of the matter:
- The first phenomenon – cars racing backwards – is unlikely to happen in real life but quite possible, and some crazies actually do organize such races.
- The last example – objects defying gravity – is plain impossible because of Newton’s universal law of gravitation.
- The other examples – the old becoming young (and the dead coming back to life), and glass shards coming back together into one piece – are also plain impossible because of some other ‘law’: the law of ever increasing entropy.
However, there’s a distinct difference between the two ‘laws’ (gravity versus increasing entropy). As one entry on Physics Stack Exchange notes, the entropy law – better known as the second law of thermodynamics – “only describes what is most likely to happen in macroscopic systems, rather than what has to happen”, but then the author immediately qualifies this apparent lack of determinism, and rightly so: “It is true that a system may spontaneously decrease its entropy over some time period, with a small but non-zero probability. However, the probability of this happening over and over again tends to zero over long times, so is completely impossible in the limit of very long times.” Hence, while one will find some people wondering whether this entropy law is a ‘real law’ of Nature – in the sense that they would question that it’s always true no matter what – there is actually no room for such doubts.
That being said, the character of the entropy law and the universal law of gravitation is obviously somewhat different – because they describe different realities: the entropy law is a law at the level of a system (a room full of air, for example), while the law of gravitation describes one of the four fundamental forces.
I will now be a bit more formal. What’s time symmetry in physics? The Wikipedia definition is the following: “T-symmetry is the theoretical symmetry (invariance) of physical laws under a time reversal (T) transformation.” Huh?
A ‘time reversal transformation’ amounts to inserting –t (minus t) instead of t in all of our equations describing trajectories or physical laws. Such transformation is illustrated below. The blue curve might represent a car or a rocket accelerating (in this particular example, we have a constant acceleration a = 2). The vertical axis measures the displacement (x) as a function of time (t). , and the red curve is its T-transformation. The two curves are each other’s mirror image, with the vertical axis (i.e. the axis measuring the displacement x) as the mirror axis.
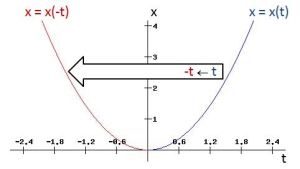
This view of things is quite static and, hence, somewhat primitive I should say. However, we can make a number of remarks already. For example, we can see that the slope (of the tangent) of the red curve is negative. This slope is the velocity (v) of the particle: v = dx/dt. Hence, a T-transformation is said to negate the velocity variable (in classical physics that is), just like it negates the time variable. [The verb ‘to negate’ is used here in its mathematical sense: it means ‘to take the additive inverse of a number’ — but you’ll agree that’s too lengthy to be useful as an expression.]
Note that velocity (and mass) determines (linear and angular) momentum and, hence, a T-transformation will also negate p and l, i.e. the linear and angular momentum of a particle.
Such variables – i.e. variables that are negated by the T-transformation – are referred to as odd variables, as opposed to even variables, which are not impacted by the T-transformation: the position of the particle or object (x) is an example of an even variable, and the force acting on a particle (F) is not being negated either: it just remains what it is, i.e. an external force acting on some mass or some charge. The acceleration itself is another ‘even’ variable.
This all makes sense: why would the force or acceleration change? When we put a minus sign in front of the time variable, we are basically just changing the direction of an axis measuring an independent variable. In a way, the only thing that we are doing is introducing some non-standard way of measuring time, isn’t it? Instead of counting from 0 to T, we count from 0 to minus T.
Well… No. In this post, I want to discuss actual time reversal. Can we go back in time? Can we put a genie back into a bottle? Can we reverse all processes in Nature and, if not, why not?
Time reversal and time symmetry are two different things: doing a T-transformation is a mathematical operation; trying to reverse time is something real. Let’s take an example from kinematics to illustrate the matter.
Kinematics
Kinematics can be summed up in one equation, best known as Newton’s Second Law: F = ma = m(dv/dt) = d(mv)/dt. In words: the time-rate-of-change of a quantity called momentum (mv) is proportional to the force on an object. In other words: the acceleration (a) of an object is proportional to the force (F), and the factor of proportionality is the mass of the object (m). Hence, the mass of an object is nothing but a measure of its inertia.
The numbering of laws (first, second, etcetera) – usually combining some name of a scientist – is often quite arbitrary but, in this case (Newton’s Laws), one can really learn something from listing and discussing them in the right order:
- Newton’s First Law is the principle of inertia: if there’s no (other) force acting on an object, it will just continue doing what it does–i.e. nothing or, else, move in some straight line according to the direction of its momentum (i.e. the product of its mass and its velocity)–or further engage with the force it was already engaged with.
- Newton’s Second Law is the law of kinematics. In kinematics, we analyze the motion of an object without caring about the origin of the force causing the motion. So we just describe how some force impacts the motion of the object on which it is acting without asking any questions about the force itself. We’ve written this law above: F = ma.
- Finally, Newton’s Third Law is the law of gravitation, which describes the origin, the nature and the strength of the gravitational force. That’s part of dynamics, i.e. the study of the forces themselves – as opposed to kinematics, which only looks at the motion caused by those forces.
With these definitions and clarifications, we are now well armed to tackle the subject of T-symmetry in kinematics (we’ll discuss dynamics later). Suppose some object – perhaps an elementary particle but it could also be a car or a rocket indeed – is moving through space with some constant acceleration a (so we can write a(t) = a). This means that v(t) – the velocity as a function of time – will not be constant: v(t) = at. [Note that we make abstraction of the direction here and, hence, our notation does not use any bold letters (which would denote vector quantities): v(t) and a(t) are just simple scalar quantities in this example.]
Of course, when we – i.e. you and me right here and right now – are talking time reversal, we obviously do it from some kind of vantage point. That vantage point will usually be the “now” (and quite often also the “here”), and so let’s use that as our reference frame indeed and we will refer to it as the zero time point: t = 0. So it’s not the origin of time: it’s just ‘now’–the start of our analysis.
Now, the idea of going back in time also implies the idea of looking forward – and vice versa. Let’s first do what we’re used to do and so that’s to look forward.
At some point in the future, let’s call it t = T, the velocity of our object will be equal to v(T) = v(0) + aT. Why the v(0)? Well… We defined the zero time point (t = 0) in a totally random way and, hence, our object is unlikely to stop for that. On the contrary: it is likely to already have some velocity and so that’s why we’re adding this v(0) here. As for the space coordinate, our object may also not be at the exact same spot as we are (we don’t want to be to close to a departing rocket I would assume), so we can also not assume that x(0) = 0 and so we will also incorporate that term somehow. It’s not essential to the analysis though.
OK. Now we are ready to calculate the distance that our object will have traveled at point T. Indeed, you’ll remember that the distance traveled is an infinite sum of infinitesimally small products vΔt: the velocity at each point of time multiplied by an infinitesimally small interval of time. You’ll remember that we write such infinite sum as an integral:
[In case you wonder why we use the letter ‘s’ for distance traveled: it’s because the ‘d’ symbol is already used to denote a differential and, hence, ‘s’ is supposed to stand for ‘spatium’, which is the Latin word for distance or space. As for the integral sign, you know that’s an elongated S really, don’t you? So its stands for an infinite sum indeed. But lets go back to the main story.]
We have a functional form for v(t), namely v(t) = v(0) + at, and so we can easily work out this integral to find s as a function of time. We get the following equation:

When we re-arrange this equation, we get the position of our object as a function of time:
Let us now reverse time by inserting –T everywhere:

Does that still make sense? Yes, of course, because we get the same result when doing our integral:

So that ‘makes sense’. However, I am not talking mathematical consistency when I am asking if it still ‘makes sense’. Let us interpret all of this by looking at what’s happening with the velocity. At t = 0, the velocity of the object is v(0), but T seconds ago, i.e. at point t = -T, the velocity of the object was v(-T) = v(0) – aT. This velocity is less than v(0) and, depending on the value of -T, it might actually be negative. Hence, when we’re looking back in time, we see the object decelerating (and we should immediately add that the deceleration is – just like the acceleration – a constant). In fact, it’s the very same constant a which determines when the velocity becomes zero and then, when going even further back in time, when it becomes negative.
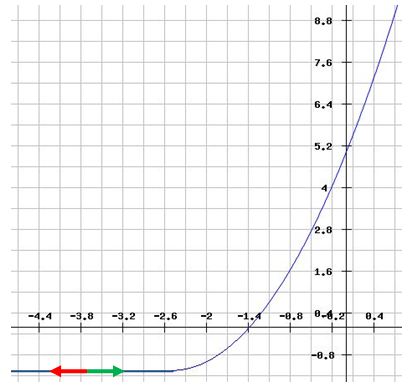
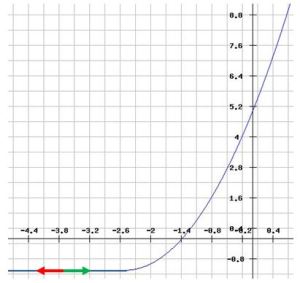
Huh? Negative velocity? Here’s the difference with the movie: in that movie that we are playing backwards, our car, our rocket, or the glass falling from a table or a pedestal would come to rest at some point back in time. We can calculate that point from our velocity equation v(t) = v(0) + at. In the example below, our object started accelerating 2.5 seconds ago, at point t = –2.5. But, unlike what we would see happening in our backwards-playing movie, we see that object not only stopping but also reversing its direction, to go in the same direction as we saw it going when we’re watching the movie before we hit the ‘Play Backwards’ button. So, yes, the velocity of our object changes sign as it starts following the trajectory on the left side of the graph.

What’s going on here? Well… Rest assured: it’s actually quite simple: because the car or that rocket in our movie are real-life objects which were actually at rest before t = –2.5, the left side of the graph above is – quite simply – not relevant: it’s just a mathematical thing. So it does not depict the real-life trajectory of an accelerating car or rocket. The real-life trajectory of that car or rocket is depicted below.
So we also have a ‘left side’ here: a horizontal line representing no movement at all. Our movie may or may not have included this status quo. If it did, you should note that we would not be able to distinguish whether or not it would be playing forward or backwards. In fact, we wouldn’t be able to tell whether the movie was playing at all: we might just as well have hit the ‘pause’ button and stare at a frozen screenshot.
Does that make sense? Yes. There are no forces acting on this object here and, hence, there is no arrow of time.
Dynamics
The numerical example above is confusing because our mind is not only thinking about the trajectory as such but also about the force causing the particle—or the car or the rocket in the example above—to move in this or that direction. When it’s a rocket, we know it ignited its boosters 2.5 seconds ago (because that’s what we saw – in reality or in a movie of the event) and, hence, seeing that same rocket move backwards – both in time as well as in space – while its boosters operate at full thrust does not make sense to us. Likewise, an obstacle escaping gravity with no other forces acting on it does not make sense either.
That being said, reversing the trajectory and, hence, actually reversing the effects of time, should not be a problem—from a purely theoretical point at least: we should just apply twice the force produced by the boosters to give that rocket the same acceleration in the reverse direction. That would obviously means we would force it to crash back into the Earth. Because that would be rather complicated (we’d need twice as many boosters but mounted in the opposite direction), and because it would also be somewhat evil from a moral point of view, let us consider some less destructive examples.
Let’s take gravity, or electrostatic attraction or repulsion. These two forces also cause uniform acceleration or deceleration on objects. Indeed, one can describe the force field of a large mass (e.g. the Earth)—or, in electrostatics, some positive or negative charge in space— using field vectors. The field vectors for the electric field are denoted by E, and, in his famous Lectures on Physics, Feynman uses a C for the gravitational field. The forces on some other mass m and on some other charge q can then be written as F = mC and F = qE respectively. The similarity with the F = ma equation – Newton’s Second Law in other words – is obvious, except that F = mC and F = qE are an expression of the origin, the nature and the strength of the force:
- In the case of the electrostatic force (remember that likes repel and opposites attract), the magnitude of E is equal to E = qc/4πε0r2. In this equation, ε0 is the electric constant, which we’ve encountered before, and r is the distance between the charge q and the charge qc causing the field).
- For the gravitational field we have something similar, except that there’s only attraction between masses, no repulsion. The magnitude of C will be equal to C = –GmE/r2, with mE the mass causing the gravitational field (e.g. the mass of the Earth) and G the universal gravitational constant. [Note that the minus sign makes the direction of the force come out alright taking the existing conventions: indeed, it’s repulsion that gets the positive sign – but that should be of no concern to us here.]
So now we’ve explained the dynamics behind that x(t) = x(0) + v(0)·t + (a/2)·t2 curve above, and it’s these dynamics that explain why looking back in time does not make sense—not in a mathematical way but in philosophical way. Indeed, it’s the nature of the force that gives time (or the direction of motion, which is the very same ‘arrow of time’) one–and only one–logical direction.
OK… But so what is time reversibility then – or time symmetry as it’s referred to? Let me defer an answer to this question by first introducing another topic.
Even and odd functions
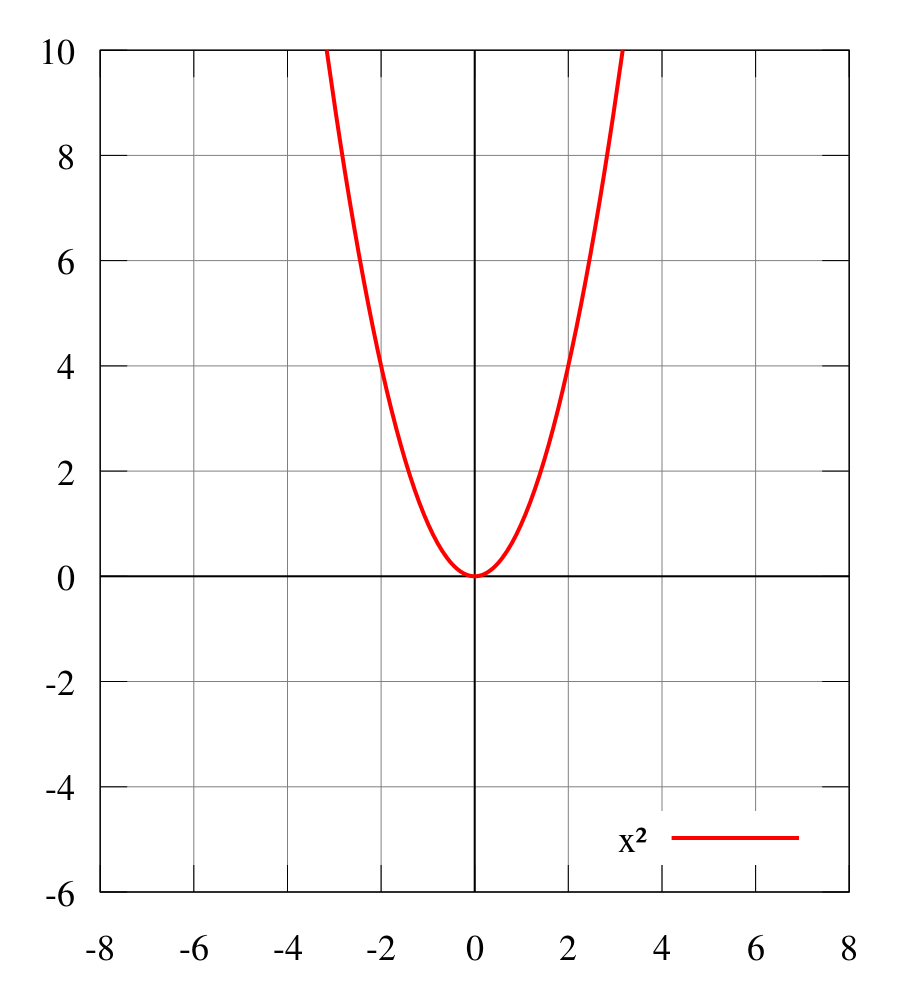
I already introduced the concept of even and odd variables above. It’s obviously linked to some symmetry/asymmetry. The x(t) curve above is symmetric. It is obvious that, if we would change our coordinate system to let x(0) equal x(0) = 0, and also choose the origin of time such that v(0) = 0, then we’d have a nice symmetry with respect to the vertical axis. The graph of the quadratic function below illustrates such symmetry.
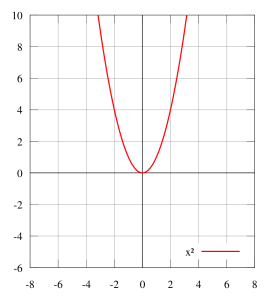 Functions with a graph such as the one above are called even functions. A (real-valued) function f(t) of a (real) variable t is defined as even if, for all t and –t in the domain of f, we find that f(t) = f(–t).
Functions with a graph such as the one above are called even functions. A (real-valued) function f(t) of a (real) variable t is defined as even if, for all t and –t in the domain of f, we find that f(t) = f(–t).
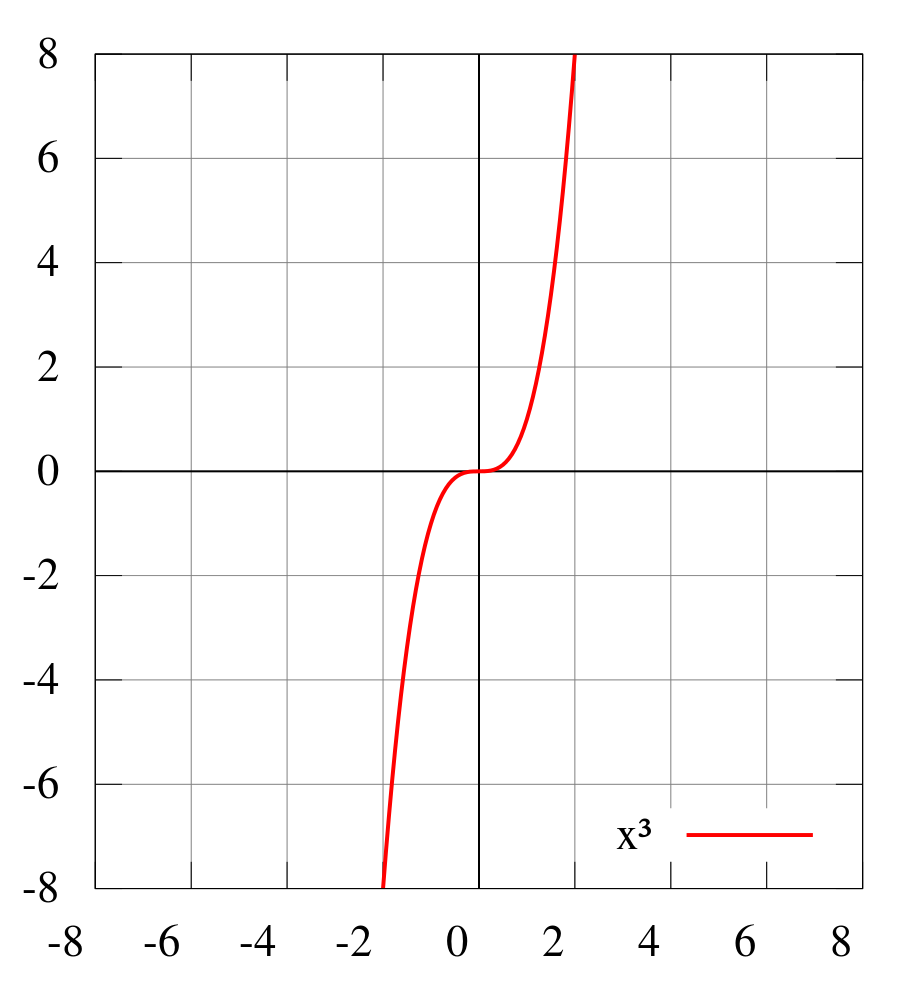
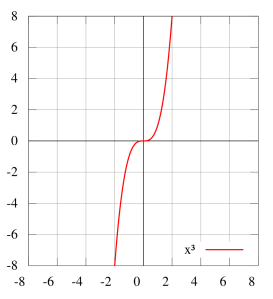
We also have odd functions, such as the one depicted below. An odd function is a function for which f(-t) = –f(t).
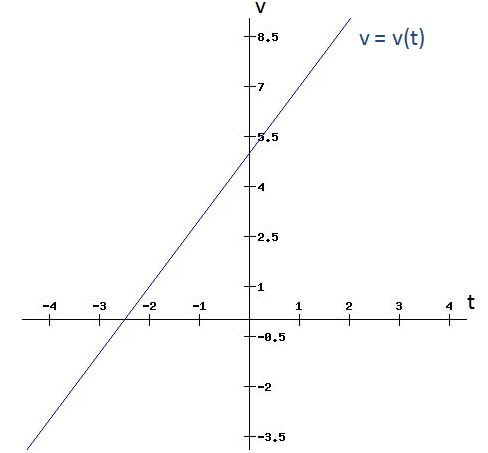
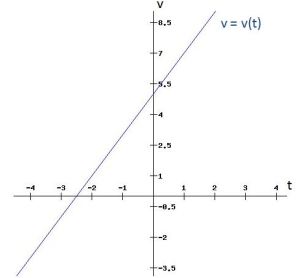
The function below gives the velocity as a function of time, and it’s clear that this would be an odd function if we would choose the zero time point such that v(0) = 0. In that case, we’d have a line through the origin and the graph would show an odd function. So that’s why we refer to v as an odd variable under time reversal.
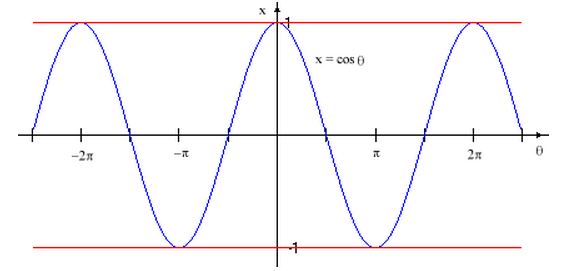
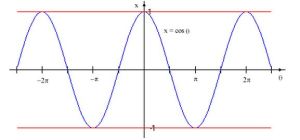
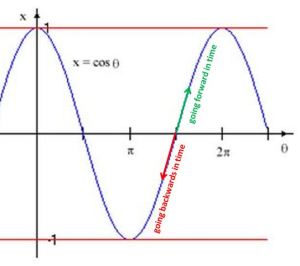
A very particular and very interesting example of an even function is the cosine function – as illustrated below.
 Now, we said that the left side of the graph of the trajectory of our car or our rocket (i.e. the side with a negative slope and, hence, negative velocity) did not make much sense, because – as we play our movie backwards – it would depict a car or a rocket accelerating in the absence of a force. But let’s look at another situation here: a cosine function like the one above could actually represent the trajectory of a mass oscillating on a spring, as illustrated below.
Now, we said that the left side of the graph of the trajectory of our car or our rocket (i.e. the side with a negative slope and, hence, negative velocity) did not make much sense, because – as we play our movie backwards – it would depict a car or a rocket accelerating in the absence of a force. But let’s look at another situation here: a cosine function like the one above could actually represent the trajectory of a mass oscillating on a spring, as illustrated below.
 In the case of a spring, the force causing the oscillation pulls back when the spring is stretched, and it pushes back when it’s compressed, so the mechanism is such that the direction of the force is being reversed continually. According to Hooke’s Law, this force is proportional to the amount of stretch. If x is the displacement of the mass m, and k that factor of proportionality, then the following equality must hold at all times:
In the case of a spring, the force causing the oscillation pulls back when the spring is stretched, and it pushes back when it’s compressed, so the mechanism is such that the direction of the force is being reversed continually. According to Hooke’s Law, this force is proportional to the amount of stretch. If x is the displacement of the mass m, and k that factor of proportionality, then the following equality must hold at all times:
F = ma = m(d2x/dt2) = –kx ⇔ d2x/dt2 = –(k/m)x
Is there also a logical arrow of time here? Look at the illustration below. If we follow the green arrow, we can readily imagine what’s happening: the spring gets stretched and, hence, the mass on the spring (at maximum speed as it passes the equilibrium position) encounters resistance: the spring pulls it back and, hence, it slows down and then reverses direction. In the reverse direction – i.e. the direction of the red arrow – we have the reverse logic: the spring gets compressed (x is negative), the mass slows down (as evidence by the curvature of the graph), and – at some point – it also reverses its direction of movement. [I could note that the force equation above is actually a second-order linear differential equation, and that the cosine function is its solution, but that’s a rather pedantic and, hence, totally superfluous remark here.]
What’s important is that, in this case, the ‘arrow of time’ could point either way, and both make sense. In other words, when we would make a movie of this oscillating movement, we could play it backwards and it would still make sense.
Huh? Yes. Just in case you would wonder whether this conclusion depends on our starting point, it doesn’t. Just look at the illustration below, in which I assume we are starting to watch that movie (which is being played backwards without us knowing it is being played backwards) of the oscillating spring when the mass is not in the equilibrium position. It makes perfect sense: the spring is stretched, and we see the mass accelerating to the equilibrium position, as it should.
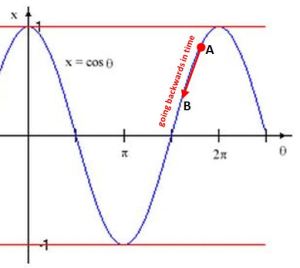
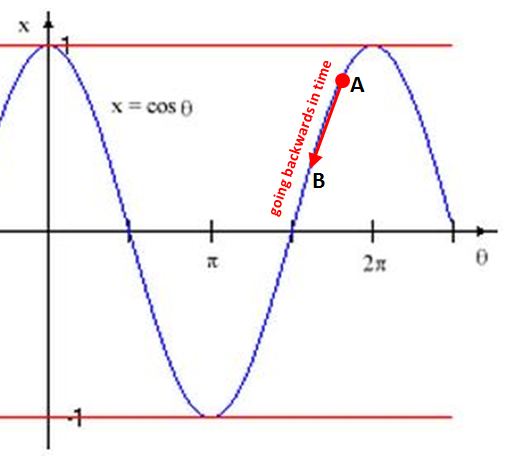
What’s going on here? Why can we reverse the arrow of time in the case of the spring, and why can’t we do that in the case of that particle being attracted or repelled by another? Are there two realities here? No. There’s only. I’ve been playing a trick on you. Just think about what is actually happening and then think about that so-called ‘time reversal’:
- At point A, the spring is still being stretched further, in reality that is, and so the mass is moving away from the equilibrium position. Hence, in reality, it will not move to point B but further away from the equilibrium position.
- However, we could imagine it moving from point A to B if we would reverse the direction of the force. Indeed, the force is equal to –kx and reversing its direction is equivalent to flipping our graph around the horizontal axis (i.e. the time axis), or to shifting the time axis left or right with an amount equal to π (note that the ‘time’ axis is actually represented by the phase, but that’s a minor technical detail and it does not change the analysis: we just measure time in radians here instead of seconds).
It’s a visual trick. There is no ‘real’ symmetry. The flipped graph corresponds to another situation (i.e. some other spring that started oscillating a bit earlier or later than ours here). Hence, our conclusion that it is the force that gives time direction, still holds.
Hmm… Let’s think about this. What makes our ‘trick’ work is that the force is allowed to change direction. Well… If we go back to our previous example of an object falling towards the center of some gravitational field, or a charge being attracted by some other (opposite) charge, then you’ll note that we can make sense of the ‘left side’ of the graph if we would change the sign of the force.
Huh? Yes, I know. This is getting complicated. But think about it. The graph below might represent a charged particle being repelled by another (stationary) particle: that’s the green arrow. We can then go back in time (i.e. we reverse the green arrow) if we reverse the direction of the force from repulsion to attraction. Now, that would usually lead to a dramatic event—the end of the story to be precise. Indeed, once the two particles get together, they’re glued together and so we’d have to draw another horizontal line going in the minus t direction (i.e. to the left side of our time axis) representing the status quo. Indeed, if the two particles sit right on top of each other, or if they would literally fuse or annihilate each other (like a particle and an anti-particle), then there’s no force or anything left at all… except if… we would alter the direction of the force once again, in which case the two particles would fly apart again (OK. OK. You’re right in noting that’s not true in the annihilation case – but that’s a minor detail).

Is this story getting too complicated? It shouldn’t. The point to note is that reversibility – i.e. time reversal in the philosophical meaning of the word (not that mathematical business of inserting negative variables instead of positive ones) – is all about changing the direction of the force: going back in time implies that we reverse the effects of time, and reversing the effects of time, requires forces acting in the opposite direction.
Now, when it’s only kinetic energy that is involved, then it should be easy but when charges are involved, which is the case for all fundamental forces, then it’s not so easy. That’s when charge (C) and parity (P) symmetry come into the picture.
CP symmetry
Hooke’s ‘Law’ – i.e. the law describing the force on a mass on a stretched or compressed spring – is not a fundamental law: eventually the spring will stop. Yes. It will stop even if when it’s in a horizontal position and with the mass moving on a frictionless surface, as assumed above: the forces between the atoms and/or molecules in the spring give the spring the elasticity which causes the mass to oscillate around some equilibrium position, but some of the energy of that continuous movement gets lost in heat energy (yes, an oscillating spring does actually get warmer!) and, hence, eventually the movement will peter out and stop.
Nevertheless, the lesson we learned above is a valuable one: when it comes to the fundamental forces, we can reverse the arrow of time and still make sense of it all if we also reverse the ‘charges’. The term ‘charges’ encompasses anything measuring a propensity to interact through one of the four fundamental forces here. That’s where CPT symmetry comes in: if we reverse time, we should also reverse the charges.
But how can we change the ‘sign’ of mass: mass is always positive, isn’t it? And what about the P-symmetry – this thing about left-handed and right-handed neutrinos?
Well… I don’t know. That’s the kind of stuff I am currently exploring in my quest. I’ll just note the following:
1. Gravity might be a so-called pseudo force – because it’s proportional to mass. I won’t go into the details of that – if only because I don’t master them as yet – but Einstein’s gut instinct that gravity is not a ‘real’ fundamental force (we just have to adjust our reference frame and work with curved spacetime) – and, hence, that ‘mass’ is not like the other force ‘charges’ – is something I want to further explore. [Apart from being a measure for inertia, you’ll remember that (rest) mass can also be looked at as equivalent to a very dense chunk of energy, as evidenced by Einstein’s energy-mass equivalence formula: E = mc2.]
As for now, I can only note that the particles in an ‘anti-world’ would have the same mass. In that sense, anti-matter is not ‘anti’-matter: it just carries opposite electromagnetic, strong and weak charges. Hence, our C-world (so the world we get when applying a charge transformation) would have all ‘charges’ reversed, but mass would still be mass.
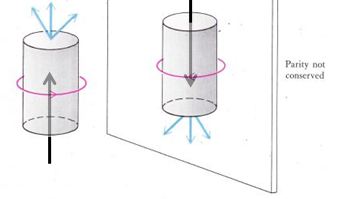
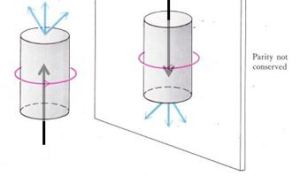
2. As for parity symmetry (i.e. left- and right-handedness, aka as mirror symmetry), I note that it’s raised primarily in relation to the so-called weak force and, hence, it’s also a ‘charge’ of sorts—in my primitive view of the world at least. The illustration below shows what P symmetry is all about really and may or may not help you to appreciate the point.

OK. What is this? Let’s just go step by step here.
The ‘cylinder’ (both in (a), the upper part of the illustration, and in (b), the lower part) represents a muon—or a bunch of muons actually. A muon is an unstable particle in the lepton family. Think of it as a very heavy electron for all practical purposes: it’s about 200 times the mass of an electron indeed. Its lifetime is fairly short from our (human) point of view–only 2.2 microseconds on average–but that’s actually an eternity when compared to other unstable particles.
In any case, the point to note is that it usually decays into (i) two neutrinos (one muon-neutrino and one electron-antineutrino to be precise) and – importantly – (ii) one electron, so electric charge is preserved (indeed, neutrinos got the name they have because they carry no electric charge).
Now, we have left- and right-handed muons, and we can actually line them up in one of these two directions. I would need to check how that’s done, but muons do have a magnetic moment (just like electrons) and so I must assume it’s done in the same way as in Wu’s cobalt-60 experiment: through a uniform magnetic field. In other words, we know their spin directions in an experiment like this.
Now, if the weak force would respect mirror symmetry (but we already know it doesn’t), we would not be able to distinguish (i) the muon decay process in the ‘mirror world’ (i.e. the reflection of what’s going on in the (imaginary) mirror in the illustration above) from (ii) the decay process in ‘our’ (real) world. So that would be situation (a): the number of decay electrons being emitted in an upward direction would be the same (more or less) as the amount of decay electrons being emitted in a downward direction.
However, the actual laboratory experiments show that situation (b) is actually the case: most of the electrons are being emitted in only one direction (i.e. the upward direction in the illustration above) and, hence, the weak force does not respect mirror symmetry.
So what? Is that a problem?
For eminent physicists such as Feynman, it is. As he writes in his concluding Lecture on mechanics, radiation and heat (Vol. I, Chapter 52: Symmetry in Physical Laws): “It’s like seeing small hairs growing on the north pole of a magnet but not on its south pole.” [He means it allows us to distinguish the north and the south pole of a magnet in some absolute sense. Indeed, if we’re not able to tell right from left, we’re also not able to tell north from south – in any absolute sense that is. But so the experiment shows we actually can distinguish the two in some kind of absolute sense.]
I should also note that Wolfgang Pauli, one of the pioneers of quantum mechanics, said that it was “total nonsense” when he was informed about Wu’s experimental results, and that repeated experiments were needed to actually convince him that we cannot just create a mirror world out of ours.
For me, it is not a problem.I like to think of left- and right-handedness as some charge itself, and of the combined CPT symmetry as the only symmetry that matters really. That should be evident from my rather intuitive introduction on time symmetry above.
Consider it and decide for yourself how logical or illogical it is. We could define what Feynman refers to as an axial vector: watching that muon ‘from below’, we see that its spin is clockwise, and let’s use that fact to define an axial vector pointing in the same direction as the thick black arrow (it’s the so-called ‘right-hand screw rule’ really), as shown below.
Now, let’s suppose that mirror world actually exists, in some corner in the universe, and that a guy living in that ‘mirror world’ would use that very same ‘right-hand-screw rule’: his axial vector when doing this experiment would point in the opposite direction (see the thick black arrow in the mirror, which points in the opposite direction indeed). So what’s wrong with that?
Nothing – in my modest view at least. Left- and right-handedness can just be looked at as any other ‘charge’ – I think – and, hence, if we would be able to communicate with that guy in the ‘mirror world’, the two experiments would come out the same. So the other guy would also notice that the weak force does not respect mirror symmetry but so there’s nothing wrong with that: he and I should just get over it and continue to do business as usual, wouldn’t you agree?
After all, there could be a zillion reasons for the experiment giving the results it does: perhaps the ‘right-handed’ spin of the muon is sort of transferred to the electron as the muon decays, thereby giving it the same type of magnetic moment as the one that made the muon line up in the first place. Or – in a much wilder hypothesis which no serious physicist would accept – perhaps we actually do not yet understand everything of the weak decay process: perhaps we’ve got all these solar neutrinos (which all share the same spin direction) interfering in the process.
Whatever it is: Nature knows the difference between left and right, and I think there’s nothing wrong with that. Full stop.
But then what is ‘left’ and ‘right’ really? As the experiment pointed out, we can actually distinguish between the two in some kind of absolute sense. It’s not just a convention. As Feynman notes, we could decide to label ‘right’ as ‘left’, and ‘left’ as ‘right’ right here and right now – and impose the new convention everywhere – but then these physics experiments will always yield the same physical results, regardless of our conventions. So, while we’d put different stickers on the results, the laws of physics would continue to distinguish between left and right in the same absolute sense as Wu’s cobalt-60 decay experiment did back in 1956.
The really interesting thing in this rather lengthy discussion–in my humble opinion at least–is that imaginary ‘guy in the mirror world’. Could such mirror world exist? Why not? Let’s suppose it does really exist and that we can establish some conversation with that guy (or whatever other intelligent life form inhabiting that world).
We could then use these beta decay processes to make sure his ‘left’ and ‘right’ definitions are equal to our ‘left’ and ‘right’ definitions. Indeed, we would tell him that the muons can be left- or right-handed, and we would ask him to check his definition of ‘right-handed’ by asking him to repeat Wu’s experiment. And, then, when finally inviting him over and preparing to physically meet with him, we should tell him he should use his “right” hand to greet us. Yes. We should really do that.
Why? Well… As Feynman notes, he (or she or whatever) might actually be living in an anti-matter world, i.e. a world in which all charges are reversed, i.e. a world in which protons carry negative charge and electrons carry positive charge, and in which the quarks have opposite color charge. In that case, we would have been updating each other on all kinds of things in a zillion exchanges, and we would have been trying hard to assure each other that our worlds are not all that different (including that crucial experiment to make sure his left and right are the same as ours), but – if he would happen to live in an anti-matter world – then he would put out his left hand – not his right – when getting out of his spaceship. Touching it would not be wise. 🙂
[Let me be much more pedantic than Feynman is and just point out that his spaceship would obviously have been annihilated by ‘our’ matter long before he would have gotten to the meeting place. As soon as he’d get out of his ‘anti-matter’ world, we’d see a big flash of light and that would be it.]
Symmetries and conservation laws
A final remark should be made on the relation between all those symmetries and conservation laws. When everything is said and done, all that we’ve got is some nice graphs and then some axis or plane of symmetry (in two and three dimensions respectively). Is there anything more to it? There is.
There’s a “deep connection”, it seems, between all these symmetries and the various ‘laws of conservation’. In our examples of ‘time symmetry’, we basically illustrated the law of energy conservation:
- When describing a particle traveling through an electrostatic or gravitation field, we basically just made the case that potential energy is converted into kinetic energy, or vice versa.
- When describing an oscillating mass on a spring, we basically looked at the spring as a reservoir of energy – releasing and absorbing kinetic energy as the mass oscillates around its zero energy point – but, once again, all we described was a system in which the total amount of energy – kinetic and elastic – remained the same.
In fact, the whole discussion on CPT symmetry above has been quite simplistic and can be summarized as follows:
Energy is being conserved. Therefore, if you want to reverse time, you’ll need to reverse the forces as well. And reversing the forces implies a change of sign of the charges causing those forces.
In short, one should not be fascinated by T-symmetry alone. Combined CPT symmetry is much more intuitive as a concept and, hence, much more interesting. So, what’s left?
Quite a lot. I know you have many more questions at this point. At least I do:
- What does it mean in quantum mechanics? How does the Uncertainty Principle come into play?
- How does it work exactly for the strong force, or for the weak force? [I guess I’d need to find out more about neutrino physics here…]
- What about the other ‘conservation laws’ (such as the conservation of linear or angular momentum, for example)? How are they related to these ‘symmetries’.
Well… That’s complicated business it seems, and even Feynman doesn’t explore these topics in the above-mentioned final Lecture on (classical) mechanics. In any case, this post has become much too long already so I’ll just say goodbye for the moment. I promise I’ll get back to you on all of this.
Post scriptum:
If you have read my previous post (The Weird Force), you’ll wonder why – in the example of how a mirror world would relate to ours – I assume that the combined CP symmetry holds. Indeed, when discussing the ‘weird force’ (i.e. the weak force), I mentioned that it does not respect any of the symmetries, except for the combined CPT symmetry. So it does not respect (i) C symmetry, (ii) P symmetry and – importantly – it also does not respect the combined CP symmetry. This is a deep philosophical point which I’ll talk about in my next post. However, I needed this post as an ‘introduction’ to the next one.

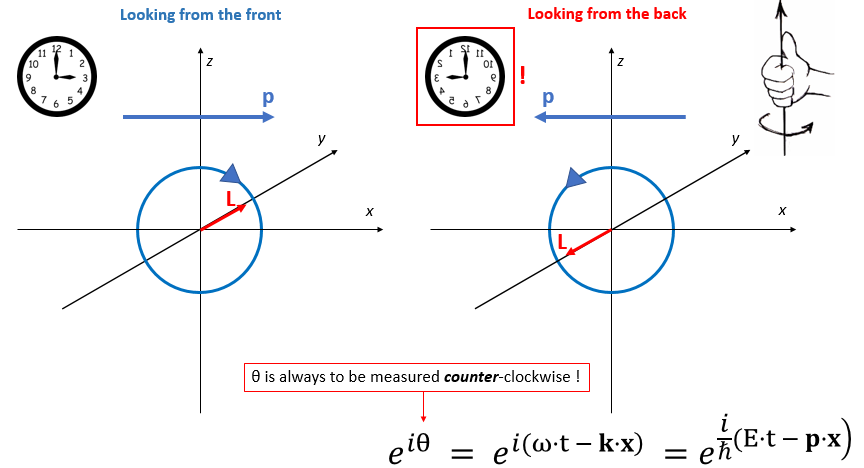 Now, suppose someone else is looking at this from the other side – or just think of yourself going around a full 180° to look at the same thing from the back side. You’ll agree you’ll see the same thing going from right to left (so that’s in the 9 o’clock direction now – or, if our clock is transparent, the 3 o’clock direction of our reversed clock). Likewise, the thing that’s turning around will now go counter-clockwise.
Now, suppose someone else is looking at this from the other side – or just think of yourself going around a full 180° to look at the same thing from the back side. You’ll agree you’ll see the same thing going from right to left (so that’s in the 9 o’clock direction now – or, if our clock is transparent, the 3 o’clock direction of our reversed clock). Likewise, the thing that’s turning around will now go counter-clockwise.
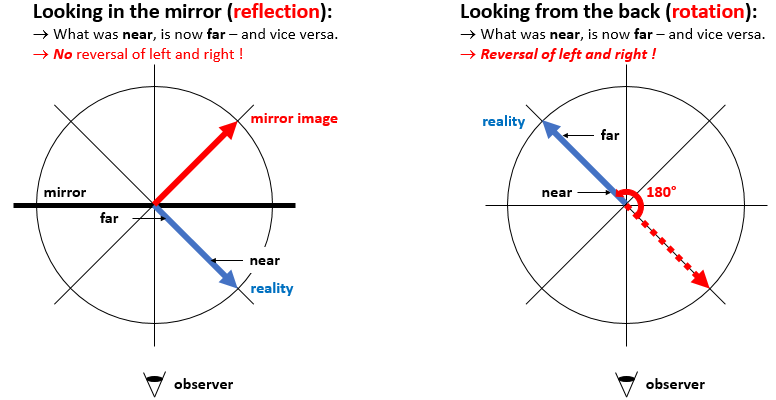
 Of course, you may now involve the photographer in the picture above and observe – note that you’re now an observer of the observer of the mirror 🙂 – that, if he would move his left arm in the real world, the photographer in the mirror world would be moving his right arm. But… Well… No. You’re saying that because you’re now imaging that you’re the photographer in the mirror world yourself now, who’s looking at the real world from inside, so to speak. So you’ve rotated the perspective in your mind and you’re saying it’s his right arm because you imagine yourself to be the photographer in the mirror. We usually do that because… Well… Because we look in a mirror every day, right? So we’re used to seeing ourselves that way and we always think it’s us we’re seeing. 🙂 However, the illustration above is correct: the mirror world only swaps near for far, and far for near, so it only swaps the sign of the y-axis.
Of course, you may now involve the photographer in the picture above and observe – note that you’re now an observer of the observer of the mirror 🙂 – that, if he would move his left arm in the real world, the photographer in the mirror world would be moving his right arm. But… Well… No. You’re saying that because you’re now imaging that you’re the photographer in the mirror world yourself now, who’s looking at the real world from inside, so to speak. So you’ve rotated the perspective in your mind and you’re saying it’s his right arm because you imagine yourself to be the photographer in the mirror. We usually do that because… Well… Because we look in a mirror every day, right? So we’re used to seeing ourselves that way and we always think it’s us we’re seeing. 🙂 However, the illustration above is correct: the mirror world only swaps near for far, and far for near, so it only swaps the sign of the y-axis.
 Now, you know that e–i·(p/ħ)·x and e–i·(p/ħ)·x are each other’s complex conjugate:
Now, you know that e–i·(p/ħ)·x and e–i·(p/ħ)·x are each other’s complex conjugate: